Concurrent Localization, Mapping and Exploration using Manifold Representations
We are investigating the use of mobile robot teams to autonomously
explore and map abitrary indoor environments. Central to our approach
is a novel map representation based on the notion of a *manifold*; the
manifold is an arbitrary two-dimensional surface embedded in a higher
dimensional space.
Our motivation for creating this representation flows from the
desire to perform autonomous tasks, such as exploration and
retro-traverse, in an environment that is only partially mapped;
moreover, these tasks must be carried out concurrently with the
simultaneous localization and mapping process. We therefore require a
map representation that is at all times self-consistent (for
autonomous behaviors, we are primariliy concerned with
self-consistency with respect to path-planning). Standard planar maps
are ill-suited for this purpose, due their tendancy to become confused
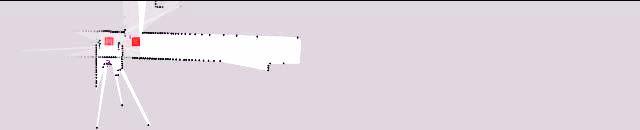
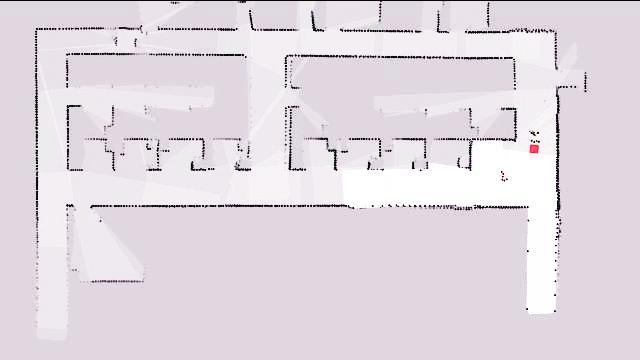
in environments containing loops. Consider, for example, the
situation shown below:
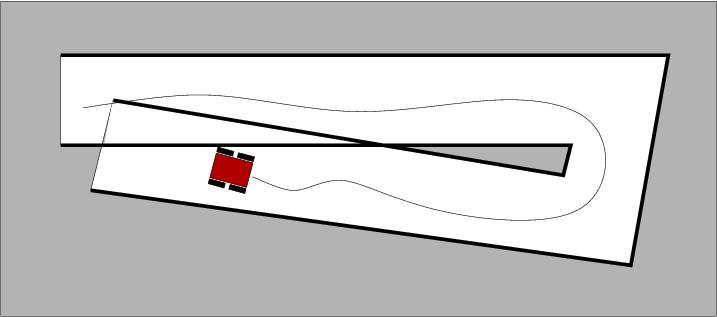
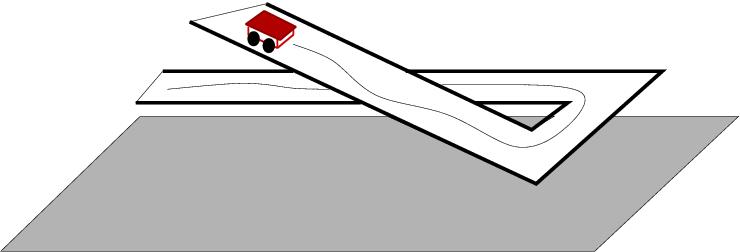
As the robot traverses a partial loop, the path of the robot crosses
over itself; this map cannot be used for path-planning. In contrast,
under the same conditions, the manifold representation remains
entirely self-consistent; robots can always construct paths, so long
as those paths are embedded in the manifold.
Click on the link below to view an animation of manifold map creation;
this animation was generated with real data, using incremental scan matching,
and no loop closure.
The manifold representation facilitates a number of interesting
capabilities, including lazy loop closure. Loop closure is
the most difficult part of the simultaneous localization and mapping
process: in order to close a loop, one must decide that two points in
the map correspond to the same point in the world (this is the
data-association problem). In the manifold representation, such
decisions can be indefinitely delayed, without risking map
consistency. In the multi-robot context, one may take this one step
further, and use active steps to discover correspondance
points. Thus, for example, pairs of robots may organize to rendezvous
at potential loop closure locations (if the robots can detect each
other, the loop is closed).
Shown below is a sequence of snap-shots taken from a two-robot
exploration experiment, illustrating the active loop closure process.
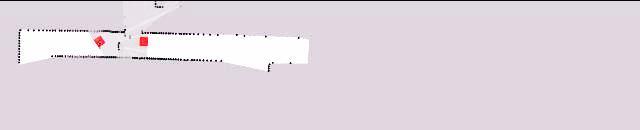
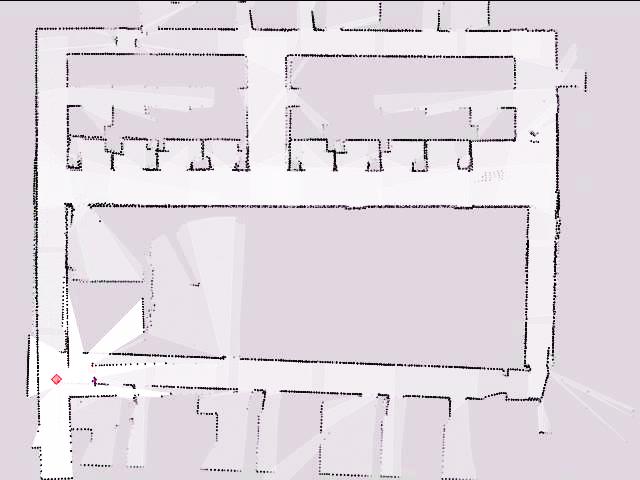
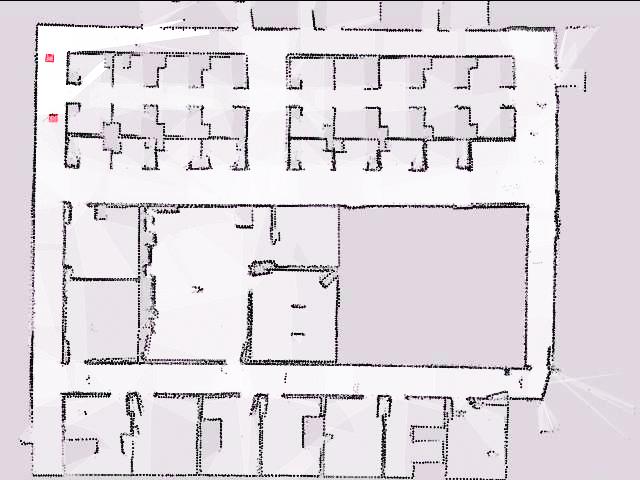
Animations of this and other exploration experiments are available here:
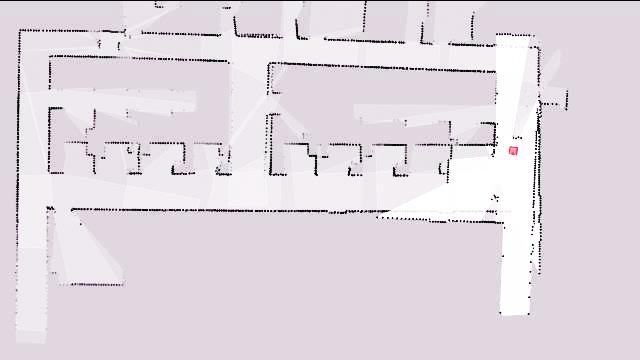
Some results from the final DARPA SDR experiments (Fort AP Hill):
- Quad robot, autonomous exploration, single entry point
- Quad robot, autonomous exploration, multiple entry points
References
Acknowledgements
This research is funded in part by the DARPA Software for Distributed
Robotics program (DARPA SDR 4400057784), which aims to field a
100-strong robot team to perform an autonomous exploration and
surveillance task.