As WiFi access points become increasingly prevalent in the urban
environment, it is natural to ask if these access points may be
exploited for purposes other than communication. In this project, we
are exploring the use of WiFi
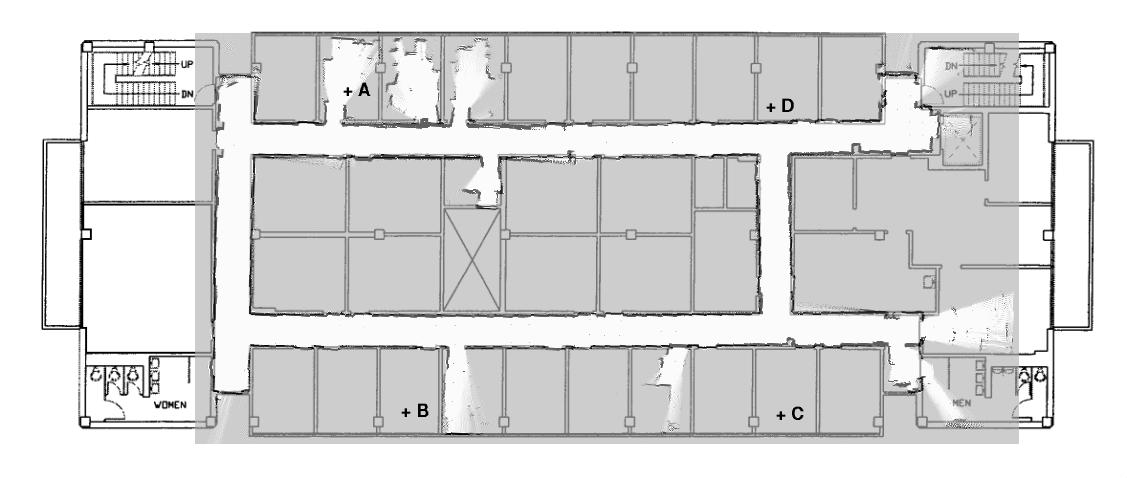
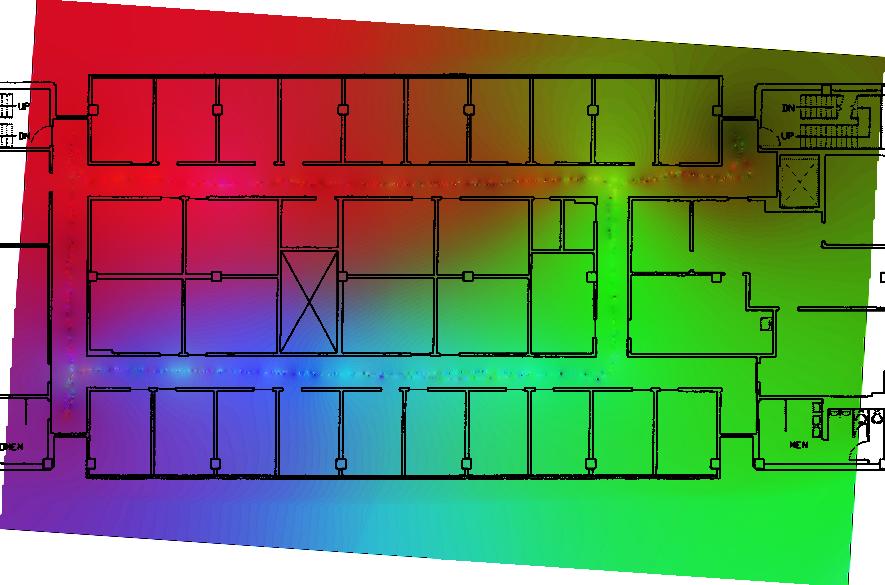
First, we construct a WiFi signal-strength map of the environment using a combination of sampling and interpolation. Samples are gathered by one or more robots; these robots are equipped with scanning laser range finders and use a standard MCL algorithm for localization . The figure below, for example, shows the WiFi signal-strength map generated for the second floor of the USC SAL building (there are four access points on this floor, only three of which are shown in the signal-strength map).
Second, we construct a
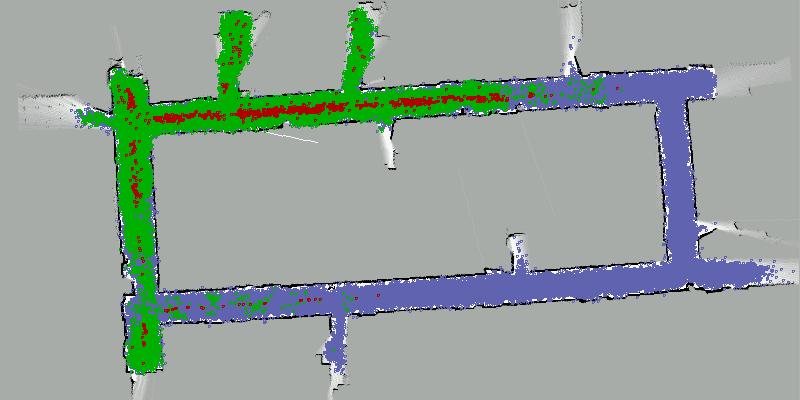
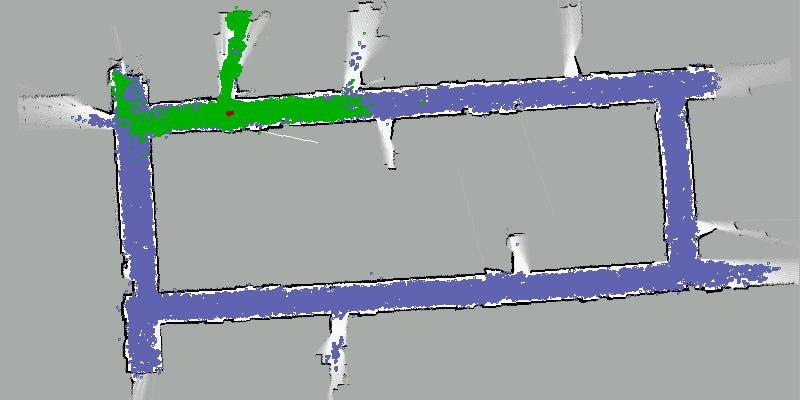
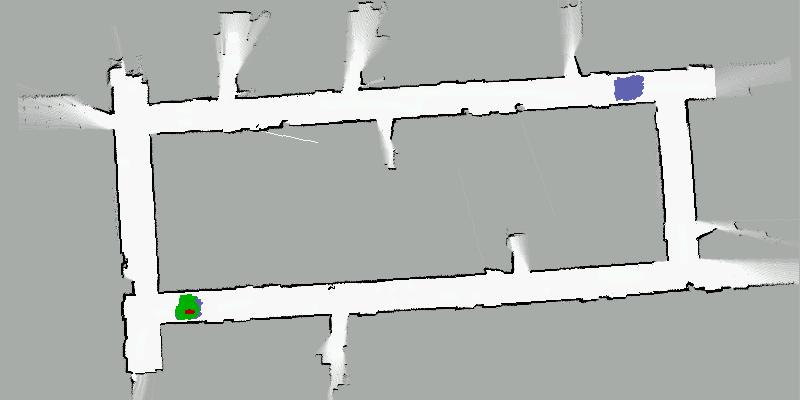
Equipped with both the signal strength map and model, robots employ a standard MCL algorithm to localize themselves. The figure below, for example, shows a particle filter converging on the correct robot pose (green dots show the WiFi-based estimate).

This work is sponsored in part by DARPA grants DABT63-99-1-0015 and 5-39509-A (via UPenn) under the Mobile Autonomous Robot Software (MARS) program.