Overview
The ability of a sensor node to move itself or to otherwise influence its location will be critical in sensor networks. The possibility of combining computation, sensing, communication and actuation to not only passively monitor the environment (like static sensor networks) but also actively track, and in some cases mitigate problems in considered a very useful design tool. We believe that augmenting static sensor networks with few mobile nodes immensely benefits the functionality of the sensor network and helps solve many of the design problems of static sensor networks.
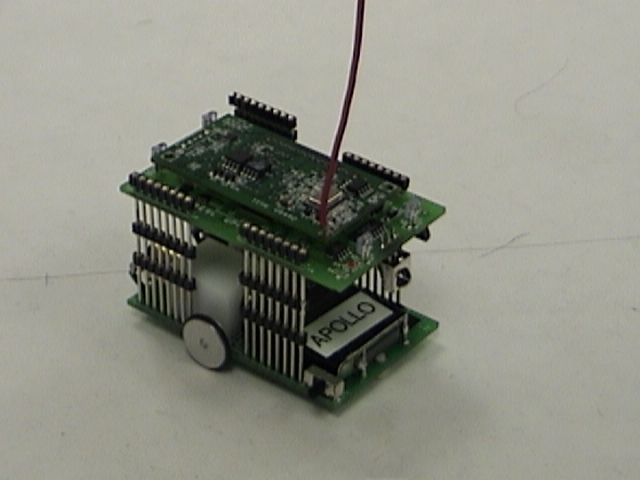
The robomote is a representative platform of a mobile sensor node. Shown here is the version 2 of the robomote (version 1 info could be found here).