|
|

| | |||||||||||||
| |
| | | | | | | | | ||||
| | |
| | | |||||||||
| | |
| | | | | |||||||
| | | | | | |||||||||
|
|
| | |||||||||||||
| |
| | | | | | | | | ||||
| | |
| | | |||||||||
| | |
| | | | | |||||||
| | | | | | |||||||||
|
|
|
The vision pod shown
above is
mounted to the front of the helicopter and houses three FireWire
cameras. The central camera can be fitted with a standard lens for
downwards looking applications, or with an omnidirectional lens, as
shown here. The center camera is a
MicroPix C-1024 FireWire camera (Color, 10 Bits, 1024x768 @
15fps) which is coupled with a
NetVision Omnidirectional lens from Remote Reality.
The sideways looking cameras are iBOT FireWire
webcams (Color, 640x480 @ 30fps), with 190° FOV fisheye lenses
from Omnitech
Robotics. A Microstrain
3DM-G IMU is mounted to the pod for measuring the motion of
the cameras independently of the helicopter's motion.
|
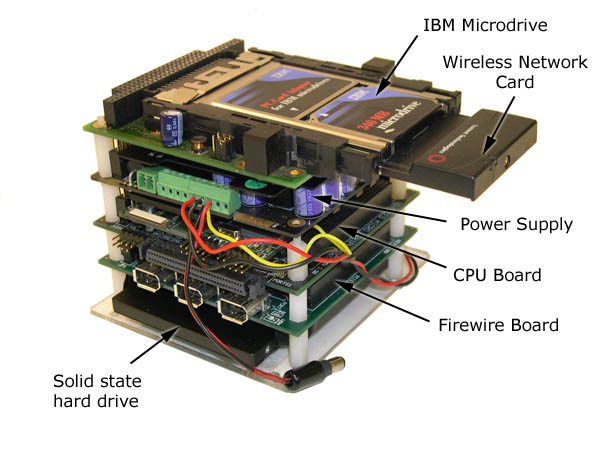
| Vision PC/104 Stack |
| In addition to the flight control PC/104 stack onboard the helicopter, a second PC/104 stack (running Linux) is used for running the vision code. The stack consists of a Tri-M HESC-104 Power supply, Tiny886ULP 800Mhz Crusoe based processor board from Advances Micro Peripherals, FireSpeed2000 Firewire Controller board from Advances Micro Peripherals, M-Systems 256MB solid state hard drive, PCMCIA card adapter, Orinoco PCMCIA 802.11b wireless card, and a 1GB IBM Microdrive. |
| |