



Reaching for humanoid robots
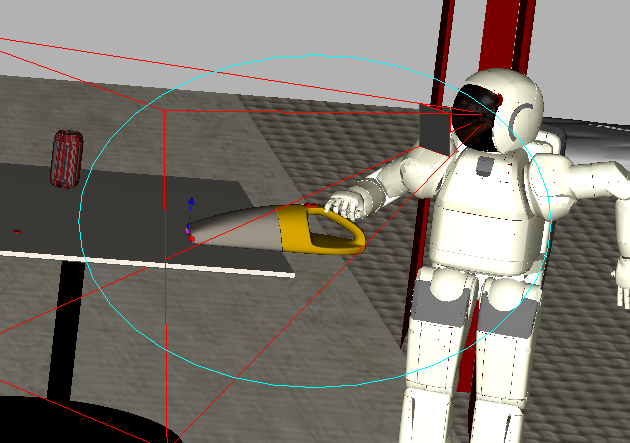
Reaching (for use with pick-and-place tasks) with humanoid robots in a collision-free manner is difficult for humanoid robots due to the high degree of kinematic redundancy and the PSPACE-complete complexity of motion planning. The papers below examine approaches applicable toward reaching in static environments; the paper by Drumwright, Kallmann, and Mataric' additionally proposes possible methods for reaching in dynamic environments.
- Evan Drumwright and Victor Ng-Thow-Hing. Toward Interactive Reaching in Static Environments for Humanoid Robots. Proc. of the IEEE Intl. Conf. on Intelligent Robots and Systems (IROS). Beijing, 2006.
- Evan Drumwright, Marcelo Kallmann, and Maja Mataric'. Toward Single-Arm Reaching for Humanoid Robots in Dynamic Environments. Proc. of the IEEE-RAS Intl. Conf. on Humanoid Robotics, Santa Monica, CA, Nov 2004.
