|
Tina |
|
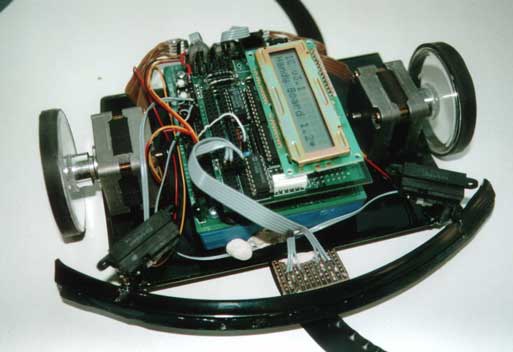
Tina is a small autonomous mobile robot that I built while completing my MSc in Mechanical Engineering at UCT. She is controlled by a Handy Board, and uses 2 stepper motors (salvaged from floppy disk drives) for the differential drive system. She has a pair of Sharp GP2D02 infrared ranging modules for obstacle avoidance, as well as a bumper connected to two micro-switches. For line following experiments, I added a pair of downward looking LED's and light sensors. The aim of building Tina was to test the capabilities of the Handy Board, and to get to know it. Also I wanted to gain experience in implementing a behavior based robot control system, using subsumption architecture. Tina was programmed with a few basic behaviors: obstacle avoidance, roaming, line following etc |