|
|
Research |
 |
|
|
Research |
|
| During my PhD, I conducted research on the autonomous helicopter ( AVATR) in the Robotics Embedded Systems Lab. The main focus of my research was on 3D situational awareness for UAVs, including stereo-based obstacle detection, 3D path planning, and dynaimc replanning. The aim was to allow an autonomous helicotper to navigate through environments such as urban canyons. |
|
For my MSc in Mechanical Engineering at the University of Cape Town I researched various aspects of robotics and built a robot and an animatron. |
|
|
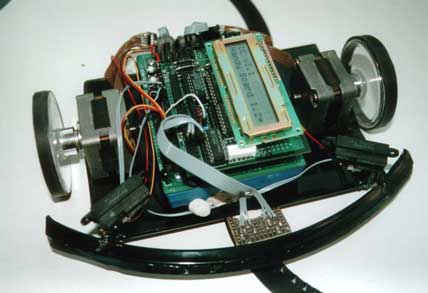
Tina is a small autonomous mobile robot |
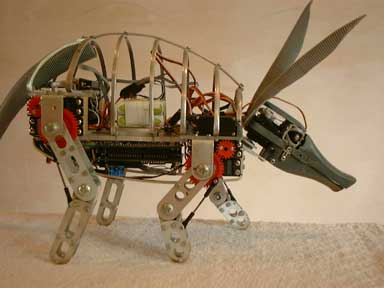
Ardie is an animatronic Aardvark built to feature in a National Geographic wildlife documentary |
|
|