|
Motion Tracking from a Mobile Robot
|
|---|
|
| Motivation |
|---|
|
The populated outdoor environment is fairly challenging to
contemporary mobile robots due to diverse motions of
pedestrians, bicycles, automobiles, etc. Since some objects
move faster than the robot, motion detection and estimation
for potential collision avoidance are the most fundamental
skills that a robot needs to function effectively outdoors.
However, detecting motion of external objects from a moving
robot is not easily achievable because there are two
independent motions involved: the motion of the robot (and
hence the sensors it carries) and the motions of moving
objects in the environment. Unfortunately, those two
motions are blended together when measured through a sensor
such as a camera. In order for a robot to detect moving
objects robustly, it should be able to decompose these two
independent motions from sensor readings.
|
|
| Approach |
|---|
|
The motion detection process is performed in two steps: the
ego-motion compensation of camera images, and the position
estimation of moving objects in the image space. For robust
detection and tracking, the position estimation process is
performed using a Bayes filter, and an adaptive particle
filter is utilized for iterative estimation.

Figure 1: Processing sequence for motion detection
The ego-motion of the camera can be estimated by tracking
features between images. When the camera moves, two
consecutive images, I(t) and I(t-1), are in
different coordinate systems. Ego-motion compensation is a
transformation from the image coordinates of I(t-1)
to that of I(t) so that the two images can be
compared directly. The transformation can be estimated
using two corresponding feature sets: a set of features in
I(t) and a set of corresponding features in
I(t-1). However, since there are independently
moving objects in the images, a transform model and outlier
detection algorithm needs to be designed so that the result
of ego-motion compensation is not sensitive to object
motions.
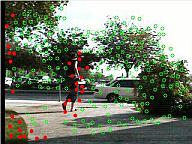
Figure 2: Tracked features (green) and outliers (red)
For frame differencing, Image I(t-1) is converted using
the transformation model before being compared to the image
I(t) in order to eliminate the effect of the camera
ego-motion.

|

|
| (a) difference with compensation |
(b) difference without compensation |
|
Figure 3: Results of frame differencing
|
Real outdoor images are contaminated by various noise
sources, eg. poor lighting conditions, camera distortion,
unstructured and changing shape of objects, etc. Thus
perfect ego-motion compensation is rarely achievable. Even
assuming that the ego-motion compensation is perfect, the
difference image would still contain structured noise on
the boundaries of objects because of the lack of depth
information from a monocular image. Some of these noise
terms are transient and some of them are constant over
time. We use a probabilistic model to filter them out and
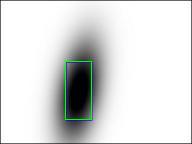
to perform robust detection and tracking. The probability
distribution of moving objects in image space is estimated
using an adaptive particle, and the final particles are
clustered using a mixture of Gaussians for the position
estimation.

|

|
|
| (a) input |
(b) particle filter |
(c) gaussian mixture |
|
Figure 4: Motion detection procedure
|
Refer to relavant papers for more details.
|
|
| Experiments |
|---|
|
The algorithms are implemented and tested in various
outdoor environments using three different robot platforms:
robotic helicopter, Segway RMP, and Pioneer2 AT. Each
platform has unique characteristics in terms of its
ego-motion. The Robotic Helicopter is an autonomous
flying vehicle carrying a monocular camera facing downward.
Once it takes off and hovers, planar movements become the
main motion, and moving objects on the ground stay at a
roughly constant distance from the camera most of the time;
however, pitch and roll motions for a change of direction
still generate complicated video sequences. The Segway
RMP a two-wheeled, dynamically stable robot with
self-balancing capability. It works like an inverted
pendulum; the wheels are driven in the direction that the
upper part of the robot is falling, which means the robot
body pitches whenever it moves. Especially when the robot
accelerates/decelerates, the pitch angle increases
seriously. The Pioneer2 AT is a typical
four-wheeled, statically stable robot.

|

|

|
| (a) robotic helicopter |
(b) Segway RMP |
(c) Pioneer2 AT |
|
Figure 5: Robot platforms for experiments
|
The performance of the tracking algorithm was evaluated by
comparing to the positions of manually tracked objects.
Refer to relavant papers for more details.
|
|
| Video Clips |
|---|
|
Experimental Platforms
Those video clips show the ego-motion of each platform.

|

|

|
| Helicopter (AVI, 5.7MB) |
Segway RMP (AVI, 15.8MB) |
Pioneer2 AT (AVI, 12.3MB) |
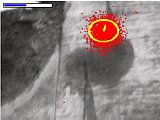
Particle Filter Output
Those video clips show the output of the particle filter.
Red dots indicate the position of particles, and the yellow
ellisoid represents the estimated position (and error). The
estimated velocity (direction and speed) is also shown
using a yellow line inside the ellipsoid. The horizontal
bar on the top-left corner shows the number of particles
being used. The maximum number of particles was set to
5,000, and the minimum number of particles was set to 500.
|

|

|
| Helicopter (AVI, 0.9MB) |
Segway RMP (AVI, 5.2MB) |
Pioneer2 AT (AVI, 4.4MB) |
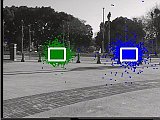
Multiple Target Tracking
|
Automobiles (AVI, 2.6MB)
This clip shows multiple particle filters tracking
automobiles. It demonstrates how particle filters
are created and destroyed dynamically. Particles
are shown only when a filter converges.
|

|
Pedestrians (AVI, 3.1MB)
This clip shows multiple particle filters tracking
pedestrians. Total four particle filters are
created. The fourth one is not shown in the video
because it does not converge.
|

|
Intersection (AVI, 2.6MB)
This clip demonstrates the stability of multiple
particle filters. There are two people walking in
different directions, and they intersect in the
middle. However, each particle filter succeeds to
track its target continuously.
|
Close the Loop: Follow a Moving Object

|
Follow a person (AVI, 36.5MB)
This clip shows the Segway RMP robot following a person.
When the person enters into the camera field-of-view,
the robot starts to follow him. There are automobiles and
pedestrians in the background, but the tracking system is
not confused by them. When the person stops and stands still,
the robot loses the target and also stops.
However, when the person start to walk again, the robot detects
the motion and start to follow him again.
|
|
|
| Acknowledgements |
|---|
|
This work is supported in part by DARPA grants
DABT63-99-1-0015, and 5-39509-A (via UPenn) under the
Mobile Autonomous Robot Software (MARS) program.
|
|
|
|
|
|


