|
Region-based Approach: Multi-Target Tracking with Multiple Robots
|
|---|
|
| Motivation |
|---|
Autonomous target tracking where targets are tracked using a network
of sensors has many potential applications; for example, surveillance,
security, etc. We are particularly interested in the case where the
sensor network used for tracking is partially mobile i.e. some members
of the network have the ability to re-position themselves in response
to target motion. Such mobile robot-based trackers are attractive for
two reasons:
- They can potentially reduce the overall number of sensors
needed in the tracking network.
- They can adapt to the movement of the targets.
Formally, we are interested in the problem of tracking multiple
anonymous targets in a bounded planar environment using a network of
communicating robots and stationary sensors. The key problem is to
develop an online, coordinated, motion strategy for robot positioning
that leads to a high degree of coverage of the environment.
|
|
| Approach |
|---|
Our approach to the problem is to divide the environment into
topologically simple constituents called regions. The following figures
show the map of the second floor of our Computer Science Building
(which consists of two long, narrow corridors and two open offices) and
the corresponding topological map.

|
|
| Figure 1: Computer Science Building |
Figure 2: Correspoding Topological Map |
Given a topological map, every robot independently maintains two density
estimates (Robot Density and Target Density) for each region
indicating the estimated number of targets in a region relative to
the size of the region. The region-based approach controls robot
deployment at two levels:
- a coarse level of control causes robots to distribute themselves
across regions depending on the density estimates.
- Within a region robots employ other strategies to look for and
follow targets.
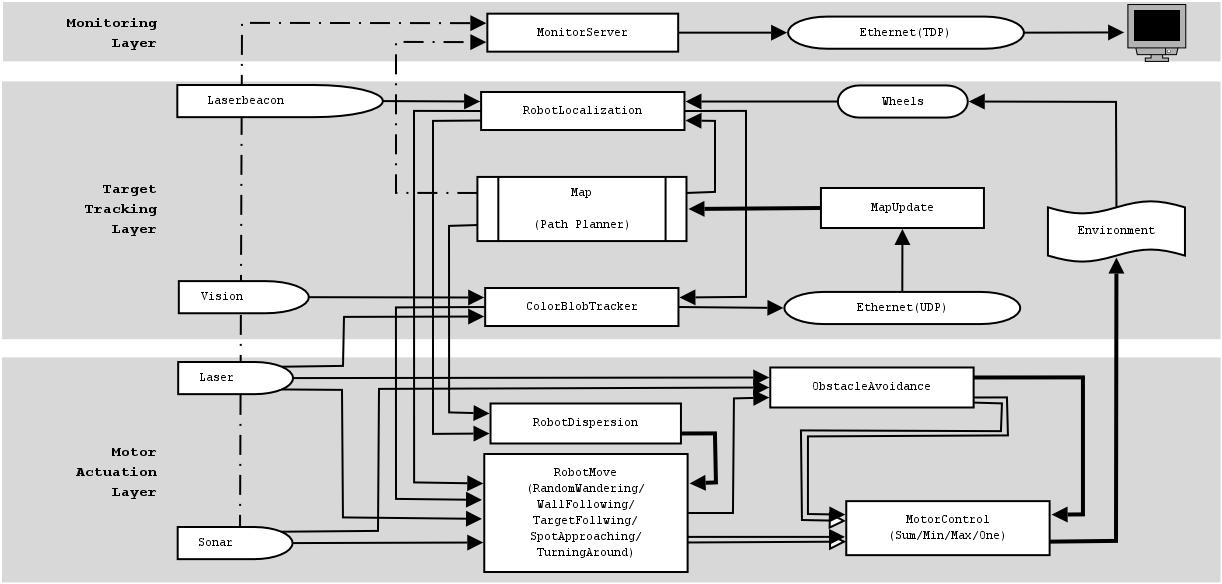
A behavior-based control system has been developed implementing the Region-based Approach. The following figure shows the control architecture of the system.
Figure 3: Control Architecture of the Behavior-based System
Refer to relavant papers for more details.
|
|
| Experiments |
|---|
|
To evaluate our approach, various experiments are perfomed with
ActivMedia Pioneer DX-2 robots and
the Player/Stage software.
Pioneer robots equipped with a SICK laser rangefinder and a Sony PTZ camera
are used for tracking, and each target is a Pioneer robot carrying
a bright-colored cylinder.

|

|
| Figure 4: Tracking robot |
Figure 5: Target |
The following topics are being studied through simulation and
real-robot experiments:
- General performance of the Region-based Approach compared to
a 'naive' strategy
- Correlation between the shapes of environments and the performance
of the Region-based Approach
- Search for proper urgency estimates, i.e. visibility maximization
- Optimal ratio of mobile robots to stationary sensors for a given
environment
Refer to relavant papers for more details.
|
|
| Video Clips |
|---|

|
Laser-based Tracker (AVI, 3.2MB)
The clip shows the output of a laser rangefinder and
the interpretation result. In the upper window, the yellow line
is a latest reading, the red line is a previous reading,
and the green line is a segmentation result.
In the lower window, the red line is a difference of conjecutive
readings, and the blue line indicates candidate regions of
moving targets. The intersection of the candidate regions
and the segmented regions are interpreted as moving targets.
|
|
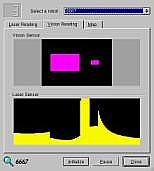
Vision-based Tracker (AVI, 1.9MB)
The clip shows the output of a vision sensor and a laser rangefinder.
A vision sensor is used to track bearings of moving targets,
and a laser rangefinder is used to measure the distance to the
moving targets. The upper window shows the output of a vision
sensor (moving targets shows in purple), and the low window
shows the output of a laser rangefinder.
|

|
Mobile Robot Tracker (AVI, 39.2MB)
The clip shows how the mobile robots track multiple targets.
The robot is using the vision-based tracker, and you can
observe the robot loosing targets once because it is totally reactive
system in terms of tracking. You can also see targets' movement; they
shows wall-following, random-wandering, random-turning.
|

|
Internal Map (AVI, 1.2MB)
The clip shows an internal, topological map of a robot.
The robot would decide to move to the right lower region
(indicated by a yello light bulb) because the region contains
more targets than robots/sensors.
|
|
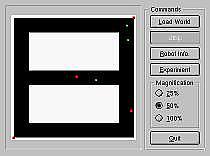
Monitoring Program (AVI, 3.9MB)
The clip shows a monitoring program. The red dots are
robots/sensors, and the green dots are detected moving targets.
It shows that one robot is heading to south but change
direction to north because the right uppoer region is more crowd.
|
|
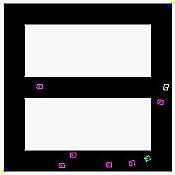
Region-based Approach 1 (AVI, 0.8MB)
The clip shows the actual screen shot of simulations.
The blue robots are fixed sensors, the yellow and green robots
are mobile sensors, and the purple robots are moving targets.
It shows the yellow robot stops following a moving target
and moves to the other crowd region because it would improve
the overall performance.
|

|
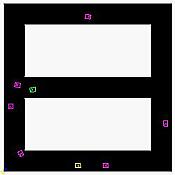
Region-based Approach 2 (AVI, 8.1MB)
The clip shows how robots cooperate together to track multiple
targets. There were too many targets in the current region, so
the other robot comes to the region and helps to track the
targets.
|

|
Region-based Approach 3 (AVI, 19.5MB)
The clip shows that the Region-based Approach makes a single
robot tracking more efficient, too. The robot initially tracks
two targets in the current region, but it moves to the next region
when one of the target moves to the next region, and the next
region becomes more crowd than the current one.
|
|
Movements within a Region 1 (AVI, 0.6MB)
The clips shows the movements of mobile sensors within a region.
Each robot keep following the current detected moving targets.
It shows how the green robot follow two targets at the same time
until they split.
|

|
Movements within a Region 2 (AVI, 10.2MB)
The clips shows that a robot always tries to maximize the
number of tracked targets by keeping a proper distance
from the center of the target group.
|

|
Local-following Strategy (AVI, 6.3MB)
The clip shows the worst case of the Local-following Strategy
, which is the case that most robots follows a single robot
who is isolated from other targets.
|

|
Region-based Strategy (AVI, 9.1MB)
The clip shows how the Region-based Strategy works in the
similar situation. Even though more than two robots happen to
track a single target, one of them would move to other region
because the robot density of the current region is way to higher
than the target density.
|
|
|
| Acknowledgements |
|---|
|
This work is supported in part by DARPA grant DABT63-99-1-0015 and
NSF grants ANI-9979457 and ANI-0082498.
|
|
|
|
|
|